Our Curruent Project is building a |

Too Simple Minded To Give Up:
How Simple Solutions Inclusive
Got Its Video Tape Made
|
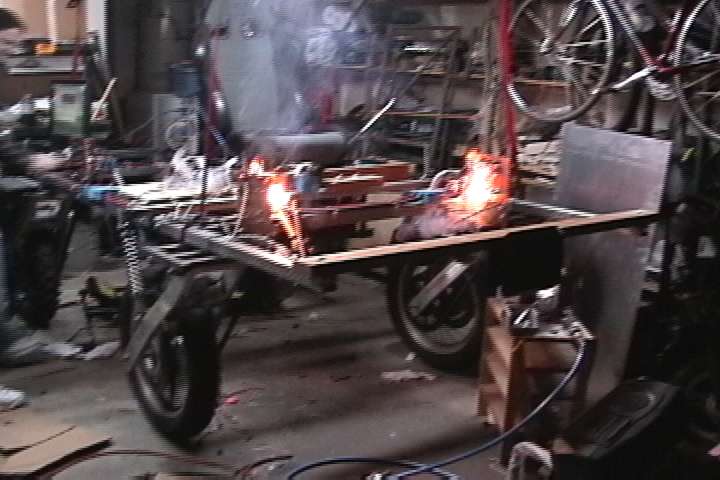
The first big deadline for the 2005 DARPA Grand Challenge was March 11th. Every team had to get a video to DARPA headquarters showing their vehicle operating under autonomously (at least a little bit) and under remote control. DARPA will review the videos and schedule site visits with those teams it thinks have a chance. One Month from DeadlineFinish wiring up all the motor FET boards and motor encoders to the PCI Motor Controller board (have had problems with motor controller software, which setback some of the circuit testing). Begin initial testing. We have one man on fire extinguisher, one man on kill switch, and one man on Camcorder. First wheel works perfectly. Second wheel goes forward wel l, then reverses well for 2 seconds, then FIRE (#1). Diagnose problem: The over-voltage circuit kicked in protecting pre-amp board and PCI Card. Believe cause to be an off-balance wheel that generated an above-tolerance voltage spike across the batteries. |
<Pictures are not in sync with
story>
|
Smoke
$120 |
Three Weeks from DeadlineAttend wedding, so no work on electronics. Work on software and sensor integration.. |
 |
|
Two Weeks from DeadlineAdd $50 (wholesale) power supply, and an over voltage dissipation circuit
(10kw, ½ ohm resistor / heating element with high power transistor switching
circuit). Replace FETs from fire and repair all for pre-amp boards.
First wheel is OK, forward only. Second wheel … FIRE (#2). Fire kills
FET board, $1000 motor controller board, and pre-amp boards Diagnose problem: Hook up scope and find that power supply has some 1 kHz ring that fried FET board, pre-amp boards, and PCI motor controller card.. |
|
$1500 |
One Week from Deadline
|
|
|
Saturday – 6 days to goSo, we rebuild two of the boards and try the circuit with batteries powering the preamp board. Seems to work. Spend three hours trying to find parts to re-build other two boards (fail). Call a friend who has an electronic manufacturing company, she has the parts and will sell them to us on a Sunday! Fill in the blanks in our autonomous vehicle software. Run more aggressive tests on the motors … FIRE (#3). Kills FETs. Ready to give up, electronics guy has a couple ideas left. |
|
$50
|
Sunday – 5 days to goWake up at 3 am in mad scientist mode. I come up with an idea to simplify circuit. Wire a forward only motor with a single FET, pulsing plus. Verify pre-amp wave form, test. FIRE (# 4). The fire kills only a single FET, the least damage so far. At 9 am rewire, retest, and analyze. Next do full test. FIRE (#5). Kills FETs, pre-amp boards, and second $1000 motor controller board. Ready to give up. Eat lunch, get stubborn, and decide we can get another controller by Tuesday. We pledge to take Tuesday night to build and test everything and then to take Wednesday off work to video tape everything. |
 |
$10
$1100 |
Monday – 4 days to goFind the seemingly perfect controllers. Two will do the job at $770 each. (The company even offers a DARPA contestant discount). Call the number, leave a message, and a page, and an email to try make sure we will be able to get them Tuesday. When no one calls back, order them at full price via the web site. Company calls back and then sends email, both confirming we will get them tomorrow. |
 |
|
Tuesday – 3 days to go
|
 |
|
Wednesday – 2 days to go
|
 |
$50 |
Thursday – Last dayFriend comes in again, and his wife helps, too. I am really sick and
they end up doing the bulk of the work. I weld some tensioners
in place to prevent any chain from falling off again. They are great,
and the right solution. Plug everything in field-test mode. The
USB hub ($20) connects to USB-to-serial adaptors ($15) and 3-foot serial
cables to the motor controllers, which connects to the electric motors.
The setup is the same as last night except that tonight we are running
off a power inverter ($80) instead of house power. Turn everything
on. FIRE (#6½). Both serial cables are on fire. Inventive profanity
ensues after killing the power. We find that we have fried the
notebook, the USB to serials, the serial cables, and maybe our beautiful
motor controllers. I have another notebook with 1 serial on it
and a 3rd (different brand) USB-to-serial adaptor.
We do not use the inverter, this notebook is fully charged. Everything
seems to be working in the air. Get U-Haul truck and trailer again.
Load it up, take 200 pounds of tools. Drive to test facility (huge
lot cleared for development) and unload vehicle. Run, first doing
autonomous tests, forward and backward work great! Turning: it
tries, but doesn’t have enough power. How can this be? It should have
enough power to drive up a vertical wall. Hook up a diagnostic program
(in bright sun on an old notebook LCD screen running on batteries).
And we find that the controllers capping the power at 12% of maximum.
As the motors are rated for more than the controllers, we raise this
to 80% of max (because that was easy to set in the configuration tool).
Run more tests, one wheel now working well, but the other wheels are
not working well. Also, there is magic smoke coming from one of the
controllers. Hook up RC controller, because what have we got to
loose. One wheel working great, reverse working OK. Drive
a little bit, more magic smoke, kill it. Shoot information portion
of video, load it up, and leave lot at 3pm. FedEx deadline is
5:30pm. 3:30 PM - 2 hours to goHook camcorder to computer, unload vehicle. We have 1 hour of video taken across the time span of this report, we rewind 20 minutes because there isn’t enough time. Windows refuses to record from MiniDV giving errors that make no sense. 4:15 PM – 75 minutes to goFind out that Windows is attempting to transcode the tape to Mpeg II. Turn that off and start downloading tape. Keeps stopping, I keep restarting. We end up with four segments. Figure some other settings must be screwy. Put all segments together, a total of 18 minutes of video. 4:40 PM – 50 minutes to goStart editing. 4:55 PM - 35 minutes to goFinish creating five-minute video. Show to friend before burning to CD. Burning to CD fails. 5:05 PM – 25 minutes to goCopy file to shared directory on network, then copy to a notebook computer. Virus software engages, slowing down the copying process. 5:12 PM – 17 minutes to goFriend drives, we take the notebook computer, blank CDs and paperwork in car and start burning CD. (“Burn” is just an expression, so no fire). CD works! But we still have to get a form notarized. 5:18 PM – 12 minutes to goFirst notary has four sets of people in line looking like they’ve been there for a while. 5:24 PM – 6 minutes to goSecond notary place has two people being helped, but no line. This may work. But no, the next day delivery has already left from there store. But still, we get a rush job on the notarization. (Thank you, mister notary guy). 5:29 PM – 1 minute to goHead to FedEx 5:32 PM – 2 minutes overArrive at FedEx, thinking we can still drive 20 miles through traffic to the downtown location which is open till 7pm, but happily there one truck that hasn't left and we drop our poorly edited, under-whelming demonstration off, and go home to bed. |
|
$2080
|
Final NotesWe had fuses on every part but only two ever blew. And even those allowed the parts they were protecting to be destroyed. Also all the fires were electrical, and though we had one person holding a fire extinguisher during every one of the tests it was never used because the auto racing master kill switch stopped all the fires before the person with the fire extinguisher got their hand to the pin. All of the cicuits we used (except the 3am cicuit) were standardized cicuits and tested in the electronics lab on our spare electric motor before we hooked them up to our vehicle. Another thing to note is this was our second vehicle; we had built a go cart sized prototyping vehicle (Mini SSIK) that we got some a number of tests with, but that vehicle is both too dangerous, and too clearly unsuited to complete in the contest. In testing it had failure cases which included spinning out of control, going full blast is a random direction, and the brakes were not reliable (disc brakes with an electical pull mechanism). |
The first, brief segment is computer driven, and the second, longer segment is remote controlled |
Total $4910 Warranties $2300 |
We figure out what our theme music isI Get Knocked Down |
||





![]()